Umelý horizont v RC modeloch – overenie za letu – 1.časť
Za tú dobu by sa už aj dieťa narodilo.
A my sme Umelý horizont pre modely stále neoverili v praxi.
Stále sa vyskytlo niečo, čo malo vyššiu prioritu, alebo sme v lete lietali „len tak“, pre radosť.
No ale leto je definitívne preč a tak, symbolicky v prvý jesenný (podzimní) deň, teda 23.9.2015 sa náš Umelý horizont dočkal praktických skúšok.
autor: Janko O.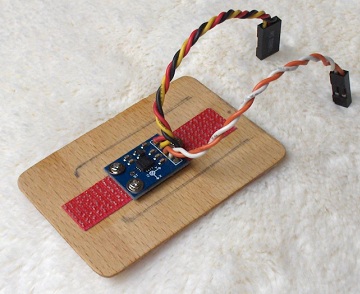 Od uverejnenia článku o vývoji nášho „Umelého horizontu“ pre RC modely už uplynulo v podstate 9 mesiacov.
Od uverejnenia článku o vývoji nášho „Umelého horizontu“ pre RC modely už uplynulo v podstate 9 mesiacov.









Spomeniem ešte jednu „výhovorku“, ktorou sme sami sebe zdôvodňovali, prečo sa do praktického overenia Umelého horizontu nepustiť (kedykoľvek, hocikedy, či práve teraz ...): Umelý horizont sa v modeli nemôže len tak „pohodiť“, niekde strčiť a pod. Musí sa umiestniť presne definovaným spôsobom, musí sa „polohovať“.
A tu bol práve ten problém. Na testovanie nových technológií máme vyhradený konkrétny model: je to EasyStar NET (Nosič Experimentálnych Technológií). Avšak usporiadanie jeho vnútorného „kabínového“ priestoru nebolo úplne najšťastnejšie. Pri každej výmene pohonnej batérie, ktorá je umiestnená na „podlahe“ kabínového priestoru (pod testovaným zariadením), bolo nutné testované zariadenie vybrať.
Už pri skúškach Stabilizačného systému nám táto skutočnosť pekne brnkala na nervy a bolo nám jasné, že to bude treba zmeniť. No a „polohovanie“ Umelého horizontu, kde sa „hráme“ na jednotlivé stupne (náklonu, predklonu, záklonu …) medzi polohou akcelerometrického modulu voči modelu ako celku, bolo tou povestnou poslednou kvapkou. Aby pri výmene batérie nebolo nutné „babrať“ do starostlivo „vypolohovaného“ Umelého horizontu, bolo rozhodnuté, že batéria sa bude do trupu modelu vkladať inak: konkrétne zospodu trupu.
A keďže EasyStar NET je rýdzo úžitkový model, ktorý si na estetiku príliš nepotrpí (lebo ani nemôže  ), tak som celú úpravu pojal ako „rýchlovku“. Zopár „radikálnych“ rezov, zopár uhlíkových výztuh, kúsok plastovej (kedysi výstražnej) tabuľky, dve zápustné matky, dve skrutky (pôvodne z PC-čiek), trochu lepidla. A výsledok sa dostavil:
), tak som celú úpravu pojal ako „rýchlovku“. Zopár „radikálnych“ rezov, zopár uhlíkových výztuh, kúsok plastovej (kedysi výstražnej) tabuľky, dve zápustné matky, dve skrutky (pôvodne z PC-čiek), trochu lepidla. A výsledok sa dostavil:

Uhlíkové (výztuhy) tyčky súčasne zabezpečujú polohu LiPol batérie v trupe.

Jednoduchý (a na výrobu rýchly) spôsob uchytenia krytu batérie.

Pripojenie servisného konektora batérie k modulu telemetrie a silového konektora k regulátoru.

Vložená pohonná LiPol batéria.

Tak a kryt je na svojom mieste.
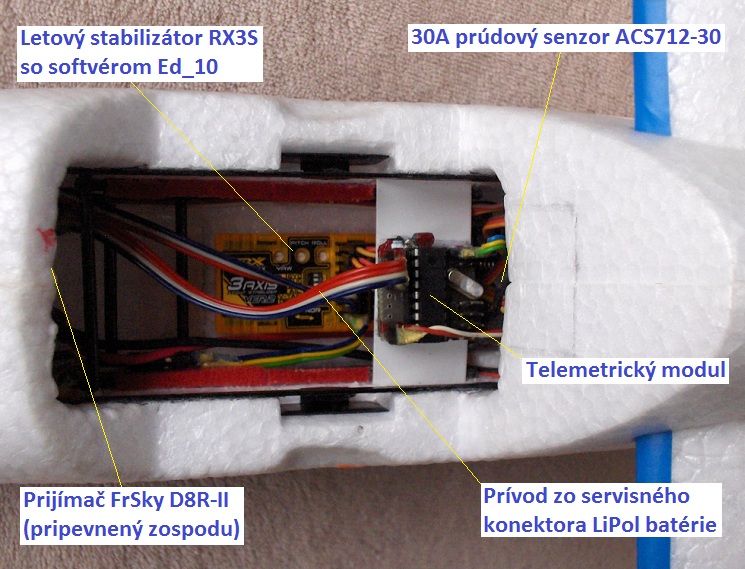
Na prístupnejšie miesto (zo suterénu na poschodie trupu) sa presťahoval aj modul telemetrie. Dôvod je ten, že občas je treba v PIC-mikrokontroléri, ktorý je ústrednou súčiastkou modulu telemetrie, zmeniť program (napríklad implementovať prenos signálov X, Y a Z z akcelerometra).
Naopak, overený a nastavený Letový stabilizátor z horného poschodia, určeného pre testované zariadenia, „zostúpil“ do sureténu, kde sú umiestnené zariadenia, ktoré sa osvedčili a už nebude nutné s nimi manipulovať:
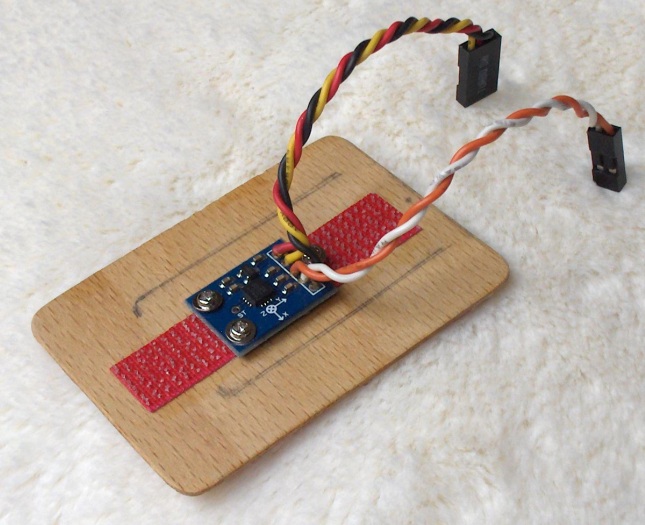
A tak sa teraz na „výslní“ horného poschodia ocitol 3-osý akcelerometrický modul.
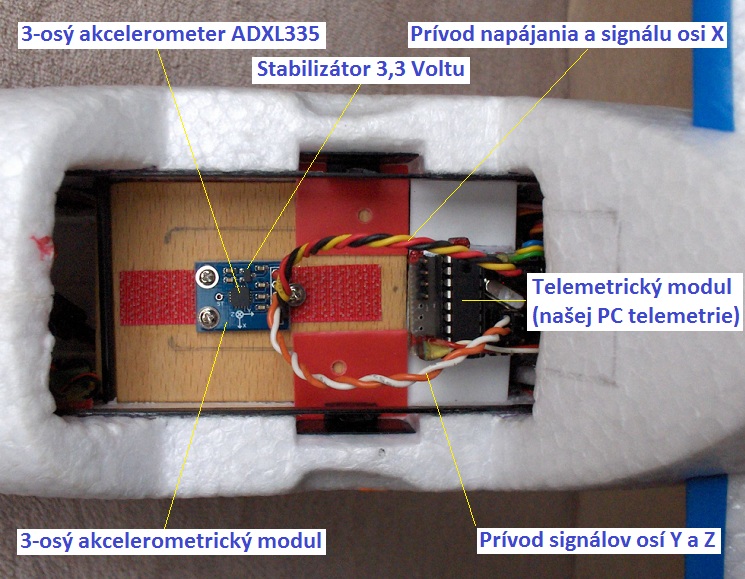
Ten je nutné (v dvoch osách) „polohovať“ s presnosťou na jeden stupeň, na čo slúžia tri skrutky:
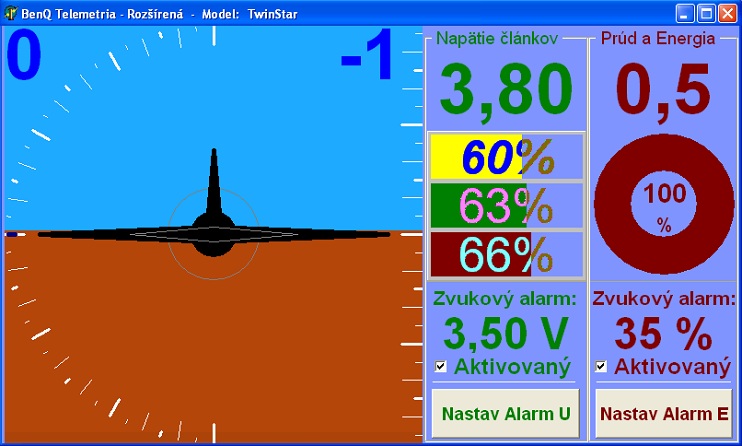
Ale poďme sa venovať samotnému overeniu Umelého horizontu ako celku.
Najprv si poďme pripomenúť, na čo hodláme Umelý horizont používať, čo od neho očakávame a či nám naše požiadavky (v tejto prvej verzii) splnil. Prvotné zadanie vzniklo takto: niekedy pred rokom - na jeseň 2014, Miroslav (mior) prišiel s myšlienkou, že by nebolo zlé vedieť, aký (bočný) náklon alebo (predo-zadný) sklon má model letiaci vo (veľkej) výške (za účelom dosiahnutia optimálnych letových výkonov (napr. veľkého vetroňa)).
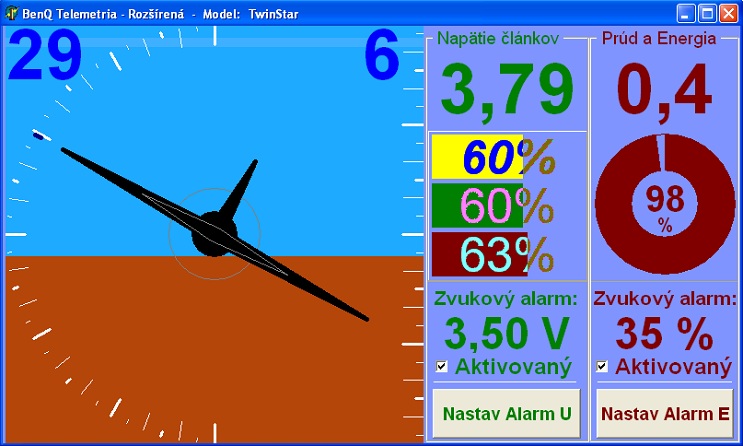
To znamená, že „služby“ Umelého horizontu by sa využívali skôr u väčších a skôr pomalšie lietajúcich modelov, hlavne vetroňov. Na rozdiel od skutočných lietadiel, kde pilot/piloti asi 50% času pozerajú na palubné prístroje a 50% času pozerajú vôkol lietadla (u veľkých dopravných strojov je to ešte horšie: 80% pozeranie na prístroje, 20% pozeranie vôkol) my predpokladáme, že by sme na Umelý horizont „kukli“ len vtedy, keď je model v ustálenej pozícii:
-
model nezrýchľuje (motorom) ani nespomaľuje (aerodynamickými brzdami)
-
model nezatáča
-
model nemení výšku po zakrivenej dráhe (napr. nerobí looping a pod.)
Ono to má aj logiku, lebo ak s modelom robíte „psie kusy“, tak asi nebudete hľadieť na displej, ale skôr pozorne sledujete model a ste sústredení na jeho riadenie.
Ide o to, že model letiaci vo výške len ťažko „vy-levelujete“, takže spravidla bude mierne naklonený na jednu či na druhú stranu a ani jeho (predo-zadný) sklon nebude optimálny. Toto všetko bude mať za následok, že plne nevyužijete letové vlastnosti svojho modelu.
Používanie Letových stabilizátorov v tomto prípade trochu komplikuje situáciu, pretože ak pilot nastaví model do nie práve optimálnej polohy, tak Letový stabilizátor sa snaží túto polohu udržať, hoci bez stabilizácie by zrejme model sám zaujal vhodnejšiu polohu.
Príklad: model vo výške sa pri pohľade z jeho ľavej strany javí byť naklonený inak ako pri pohľade z jeho pravej strany (presne tento „fenomén“ som overil za pomoci Umelého horizontu). A tak model v podstate vždy letí mierne naklonený na jednu či druhú stranu. Za normálnych okolností by začal pomaly zatáčať, ale Letový stabilizátor tomu zamedzí miernym vychýlením smerovky. A výsledok je taký, že model letí nielen že mierne naklonený, ale aj mierne bokom (pritom však jeho trajektória – dráha letu, je lineárna). Obtekanie modelu vzduchom je narušené, nehovoriac o tom, že aerodynamický odpor sa zväčší ešte aj vplyvom mierne vychýlených ovládacích plôch.
Ďalší „fenomén“, ktorý som objavil (skôr overil) vďaka Umelému horizontu, je to, že keď model letí smerom od pilota, tak sa mu zdá, že je „potlačený“ (predklonený) a pilot výškovku inštinktívne priťahuje. Naopak, keď model letí smerom k pilotovi, tak sa mu zdá, že je „natiahnutý“ (zaklonený) a pilot výškovku inštinktívne potláča. Výsledkom je rozdielna rýchlosť modelu v smere od pilota (model letí pomalšie) a v smere k pilotovi (model letí rýchlejšie) a pilot z toho usúdi, že tam hore asi riadne fúka.
Následky tohto „klamania zmyslov“ môžu byť:
-
ľahké: model letiaci k pilotovi akosi prirýchlo stratil výšku (bodaj by nie, však pilot stále usilovne potláčal výškovku), alebo
-
ťažké: model letiaci od pilota sa prepadne po krídle (pilot neprimeraným priťahovaním výškovky spomalil model tak, že ten dosiahol pádovú rýchlosť)
Isté je jedno: keď som sa pomocou Umelého horizontu snažil model správne „levelovať“ (či už som ho videl z jeho ľavej alebo pravej strany, či už letel odo mňa alebo ku mne), tak plachtil podstatne dlhšie a výšku strácal evidentne pomalšie, ako keď som Umelý horizont ignoroval.
<Staršie | tento článok | Novšie>
Napísané: 24. 9. 2015, 09:05 | Prečítané: 8854x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)