Mirage 2000-5 za letu: tá rýchlosť ma desí
Predtým však bolo potrebné realizovať niektoré úpravy, ktoré z týchto overovacích letov vyplynuli:
- doplniť ovládanie smerovky
- zdvojiť napájanie palubnej inštalácie ďalším (S)BECom
- doplniť meranie rýchlosti modelu Pitotovou trubicou
- rozšíriť merací rozsah odoberaného prúdu nad 100 A
autor: Janko O. Od „overovacích“ štartov tohto modelu z Katapultu a následných letov nad Ďatelinou, ktoré sme absolvovali s Miroslavom, uplynulo niekoľko dní a ja povzbudený týmto úspechom, zatúžil som zalietať si s „Mirážom“ viac.
Od „overovacích“ štartov tohto modelu z Katapultu a následných letov nad Ďatelinou, ktoré sme absolvovali s Miroslavom, uplynulo niekoľko dní a ja povzbudený týmto úspechom, zatúžil som zalietať si s „Mirážom“ viac.









Aby sme to trochu objasnili:
Modely bez riadenej smerovky lietajú v zákrute trochu „bokom“ (nedotáčavo), čo mi samozrejme dosť vadí u cudzích modelov, nie to ešte u vlastných. Zrejme to vadí aj Miroslavovi, pretože sme po skončení overovacích letov takmer unisono vyhlásili: "Mirage potrebuje riadenú smerovku!" Ako sme to napokon urobili, môžete vidieť na nasledujúcich fotografiách:

Detailný pohľad na umiestnenie serva.

Celkový pohľad na servo a umiestnenie tiahla ku smerovke.

Detailný pohľad na zdanlivo komplikované (avšak konštrukčne nevyhnutné) zakončenie tiahla.

Servo pod odklopeným krytom.

Výsledný vzhľad.
Zdvojenie napájania palubnej inštalácie ďalším samostatným SBECom nám vyplynulo ako „bezpečnostná“ nevyhnutnosť: Počas overovacích letov sme zistili, že prúdový odber novej pohonnej jednotky je úctyhodný, vysoko presahujúci 100 Ampérov, presnejšie povedané vysoko presahujúci 102,3A, čo je matematické obmedzenie 10-bitového prenosu (najvyššia hodnota 10-bitového čísla je 1023), ak chceme prúd zobrazovať s presnosťou na 0,1A. Avšak regulátor je len 80-Ampérový, hoci je dobre chladený, pretože je umiestnený v nasávacom tuneli dúchadla, kde vzduch prúdi rýchlosťou aj vyše 200km/h  .
.
Doteraz bola palubná inštalácia napájaná z (S)BECu, ktorý je súčasťou regulátora. Ak by však regulátor nadmerný prúdový odber pohonnej jednotky nevydržal, veľmi pravdepodobne by sa „odporúčal“ aj jeho BEC a tak by model zostal bez napájania prijímača, letového stabilizátora a serv.
Čo všetko by sa mohlo stať, ak by sa 2,5kg ťažký model letiaci rýchlosťou okolo 100 km/h, „ocitol“ bez riadenia, si radšej nechceme ani predstaviť. A tak nám bolo jasné, že napájanie palubnej inštalácie nemôže byť závislé LEN na BECe regulátora.
Možností bolo niekoľko, ale my sme sa rozhodli pre pridanie ďalšieho spínaného BECu a zlúčenie jeho 5V výstupu a výstupu „regulátotového“ BECu cez dvojitú Schottkyho diódu, principiálne podobne ako je to na tomto obrázku:
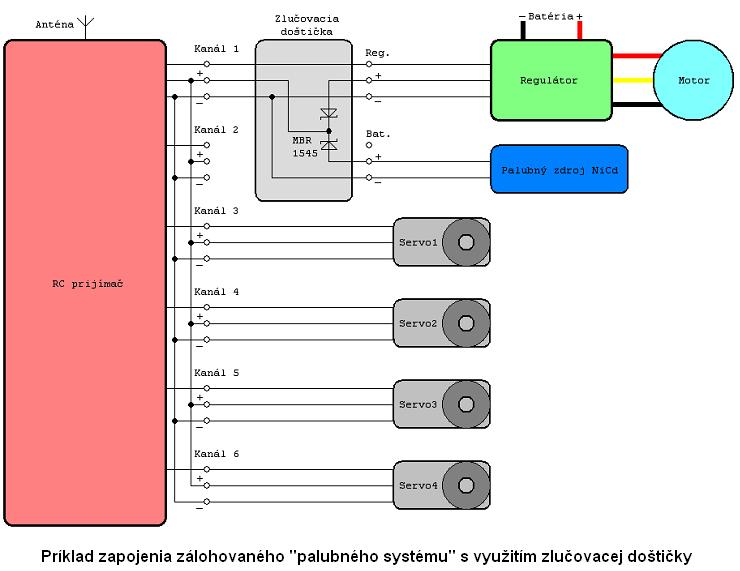
Namiesto "Palubného zdroja NiCd" (modrá krabička), je v Mirážovi použitý samostatný SBEC.
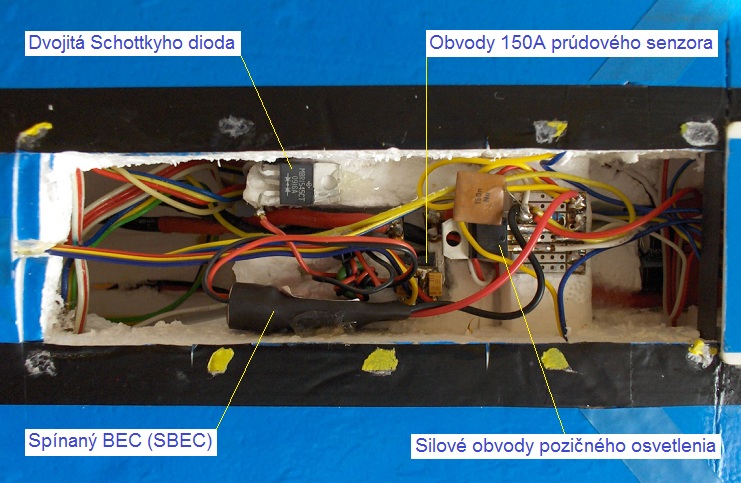
Aby sme to mohli realizovať, bolo treba odkrytovať „brucho“ Miráža, konkrétne stačilo odobrať jeden panel a potrebné obvody vložiť do technologického („brušného“) kanála. Zariadenia v kanáli (vrátane regulátora) sú počas letu celkom dobre chladené, pretože technologický kanál je čiastočne prepojený s nasávacím kanálom dúchadla (EDF), ktoré tam spôsobuje celkom slušný „prievan“. Ako to v (prednej) časti technologického kanála po úpravách vyzerá, môžete vidieť na nasledujúcom obrázku:
Po poslednej oprave a čiastočnej rekonštrukcii Miráž prišiel o rýchlomer (Pitotovu trubicu a tlakomerný senzor MPXV5004) s tým, že ak sa úpravy (najmä tie, týkajúce sa štartov z Katapultu) osvedčia, tak model rýchlomer opäť dostane. A keďže sa úpravy osvedčili a boli sme zvedaví, akou rýchlosťou Miráž vybavený novou – o dosť výkonnejšou pohonnou jednotkou lieta, tak sme k doplneniu rýchlomera aj pristúpili.
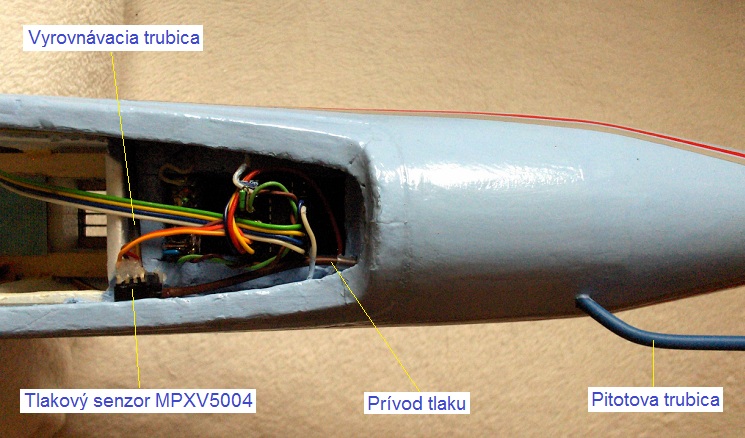
Zo začiatku to vyzeralo jednoducho: navŕtať do trupu vhodný otvor, vložiť doň Pitotovu trubicu, upevniť tlakový senzor, hadičkou prepojiť s Pitotovou trubicou a na záver pripojiť konektor senzora s modulom telemetrie. To bola naozaj „brnkačka“. Lenže …
Tlakomerný senzor MPXV5004 má „na bruchu“ otvor pre prívod vyrovnávacieho (okolitého - atmosférického - referenčného) tlaku. A keďže senzor je umiestnený v priestore, kde je aj pohonná batéria, ktorá je chladená vzduchom, ktorý (už ohriaty) je odsávaný do nasávacieho kanála dúchadla, tak do „vyrovnávacieho“ otvoru senzora sa nedostáva okolitý atmosférický (referenčný) tlak, ale podtlak spred dúchadla. To spôsobuje, že potom rýchlomer „klame“. Konkrétne: keď sme stojacemu modelu trochu „prikudlili“ (a to plyn nebol vôbec naplno), tak dúchadlo v nasávacom kanáli vytvorilo taký podtlak, že telemetria ukázala rýchlosť vyše 50 km/h .
Z toho vyplynula nutnosť, priviesť vyrovnávací (okolitý - atmosférický – referenčný) tlak do tlakového senzora nie z vnútra trupu modelu, ale z jeho boku (avšak tak, aby sa tu neuplatňoval náporový efekt prúdiaceho vzduchu  ). Preto sme na vhodnom mieste, na ľavej strane trupu vyvŕtali dierku, do ktorej sme vložili hadičku, hermeticky pripojenú k vyrovnávaciemu otvoru tlakového senzora. Znie to síce zložito, ale až taká fuška to zas nebola a po pár minútach to bolo pripravené na odskúšanie.
). Preto sme na vhodnom mieste, na ľavej strane trupu vyvŕtali dierku, do ktorej sme vložili hadičku, hermeticky pripojenú k vyrovnávaciemu otvoru tlakového senzora. Znie to síce zložito, ale až taká fuška to zas nebola a po pár minútach to bolo pripravené na odskúšanie.

Potom už síce bežiace dúchadlo nespôsobovalo žiadnu „fantómovú“ rýchlosť senzora, ale chceli sme overiť, či sa neprejavuje nežiadúci „náporový“ alebo „odsávací“ efekt vyrovnávacieho otvoru na boku trupu modelu.
Skúška fénom ukázala, že ani pri rýchlosti 70 km/h pozdĺž trupu prúdiaceho vzduchu, nie je senzor nijako ovplyvňovaný.

Posledná úprava bola rýdzo softvérová: rozšírenie meracieho rozsahu odoberaného prúdu nad sto Ampérov.
Hoci sme do Miráža ešte pred rokmi prezieravo namontovali 150-Ampérový prúdový senzor, neočakávali sme, že by sme jeho rozsah niekedy naplno využili. Pôvodná pohonná jednotka tohto modelu bola totiž koncipovaná na príkon do cca 1000W, takže aj pri (pôvodnom) 12-Voltovom (3S) napájaní prúdový odber spravidla neprekročil 80 Ampérov (preto aj 80-Ampérový regulátor).
Avšak po poslednej rekonštrukcii sme použili pohonnú jednotku s takmer trojnásobným príkonom a tak ani prechod na 6-článkové napájanie (6S = cca 24 Voltov) nezabránil tomu, aby bol merací rozsah 102,3A prekročený. Tu sa prejavuje taká „digitálna“ necnosť, kedy pri prekročení rozsahu premenná „prerotuje“ cez nulu a tak skutočný prúd 102,4A je zobrazovaný ako 0,0A, prúd 102,5A je zobrazovaný ako 0,1A atď. Preto nám pri overovacích letoch naša PC Telemetria (a aj záznam dát) na plný plyn ukazovala LEN „nejakých“ 20 Ampérov. Teraz už vieme, že v skutočnosti to bolo úctyhodných vyše 122 Ampérov.
No a tak sme použili takú softvérovú „fintu“, aby sme mohli odoberaný prúd zobrazovať 11-bitovo: čiže až do hodnoty 204,7 Ampéra (najvyššia hodnota 11-bitového čísla je 2047). Hádam nám to bude zase na pár rokov stačiť ? 
Keď boli všetky tieto úpravy hotové, vydal som sa v utorok (15.8.2017) podvečer na Ďatelinu, aby som to nie že len overil, ale aby som si aj „z plna hrdla“ zalietal. Nabil som 7 kusov batérií, čo sa však ukázalo ako nadmerne optimistický predpoklad. Napokon som bol rád, keď som až do zotmenia vylietal 5 pakov. Nie že by sa nedarilo, to nie: všetko bolo v najlepšom poriadku. Len som bol na všetko sám a vtedy je príprava, ale aj samotné štarty z Katapultu, časovo veľmi náročné.
Postupne som overil funkčnosť všetkých spomínaných úprav:
-
zdvojené napájanie palubnej inštalácie – v najlepšom poriadku
-
funkcia riadenej smerovky – v pohode
-
zobrazovanie prúdového odberu nad 102,3A – OK
-
meranie rýchlosti Pitotovou trubicou – funguje
Tu sa však musím trochu „pristaviť“.
Keď sme začiatkom Augusta s Mirážom absolvovali „overovacie“ lety ešte bez rýchlomera, tak sa nám letová rýchlosť tohto pomerne veľkého modelu nezdala byť až taká veľká. Avšak až teraz - s rýchlomerom som zistil, že aj „pomalý“ prelet popri sebe na štvrť plynu sa deje pri rýchlosti medzi 80 až 90 km/h. A keď som sa čo do pomalosti priam „odviazal“, tak rýchlosť aj tak príliš neklesla pod 70 km/h. Čo sa týka maximálnej rýchlosti: stále som sa neodvážil (aj s ohľadom na 80-Ampérový regulátor) nechať páku plynu naplno dlhšie ako 2 či 3 sekundy, aby sa Miráž poriadne "rozbehol". Vtedy odber „vyskočí“ na vyše 135 Ampérov (príkon cca 2990W) a rýchlomer zaznamenal (nemal som odvahu spustiť oči z modelu a „mrknúť“ na displej telemetrie v reálnom čase) 148 km/h.
Problém tohto (a samozrejme aj akéhokoľvek iného rýchleho) modelu je to, že plyn aj tak nemôže byť naplno dlhšie ako pár sekúnd. Za tú dobu sa model od pilota vzdiali natoľko, že už je aj tak zle viditeľný (tzv. „čitateľný“). Tak som to skúsil nie horizontálne ale vertikálne, čiže na plný plyn kolmo hore  .
.
Výsledok? Miráž aj počas letu kolmo hore ochotne zrýchľoval a po tých pár sekundách nabral takú výšku, že bol (zase) zle čitateľný. Skrátka: ako sa píše v nadpise – tá rýchlosť ma desí  . Ešte som nenašiel spôsob, ako riadiť takýto rýchly model a nebyť pri tom na pokraji infarktu. Ale možno by pomohlo pribaliť si k náradiu na lietanie plienku .
. Ešte som nenašiel spôsob, ako riadiť takýto rýchly model a nebyť pri tom na pokraji infarktu. Ale možno by pomohlo pribaliť si k náradiu na lietanie plienku .
Druhý deň som doma v kľude analyzoval letové záznamy:
- Pri štarte Miráža z Katapultu, je v priebehu jednej či dvoch sekúnd nárast rýchlosti z nuly na cca 95 km/h a tá potom vystúpa ešte na asi 120 (a niekedy aj 140) km/h, podľa toho, ako dlho psychicky vydržím neubrať plyn.
- Bežné „poletovanie“ (väčšina letového času) robím pri menšom ako polovičnom plyne. Miráž v pohode letí aj pri odbere 7 - 8 Ampérov.
- Záverečná fáza pristávania sa deje pri rýchlosti okolo 70 až 80 km/h, trávy sa model dotkne pri rýchlosti asi 60 km/h.
- Po sekunde "kĺzania" už má len 36 km/h, po ďalšej sekunde stojí nehybne v tráve.
- Z toho vyplýva, že nie len akcelerácia (zrýchlenie) ale aj decelerácia (spomalenie) dosahuje vysokých hodnôt, čomu treba uspôsobiť uchytenie ťažkých častí (napr. batérie) v modeli proti pohybu jedným aj druhým smerom.
Druhý deň po tomto „pohodovom“ lietaní som radšej zvýšil prúd LEDkám pozičného osvetlenia, aby som ešte viac zlepšil viditeľnosť (a čitateľnosť) Miráža, obzvlášť pri jeho rýchlom vzďaľovaní sa. No a priebežne zbieram odvahu na ďalšie lety  .
.
<Staršie | tento článok | Novšie>
Napísané: 19. 8. 2017, 14:02 | Prečítané: 5183x | Kategórie: Lietanie | Napísal: admin |
Komentáre: 2
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)